Esploratore di Marte
Mars Pathfinder
sonda spaziale
 Pathfinder e Sojourner prima del loro lancio nell'ottobre 1996.
Pathfinder e Sojourner prima del loro lancio nell'ottobre 1996.
| Organizzazione | JPL - NASA |
|---|---|
| Dominio | dimostratore tecnologico |
| Stato | Missione completata |
| Lancio | 4 dicembre 1996 |
| lanciatore | Delta II 7925 |
| Fine della missione | 27 settembre 1997 |
| Identificatore COSPAR | 1996-068A |
| Luogo | Sito ufficiale |
| Messa al lancio | 870 kg |
|---|---|
| Strumenti di massa | 25 kg (compreso il rover ) |
| Ergol | idrazina |
| massa propellente | 94 kg |
| v | 130 m/s (piano di crociera) |
| IMP | Telecamera |
|---|---|
| ASI/MET | Stazione metereologica |
| APXS | Spettrometro per particelle alfa e raggi X |
Mars Pathfinder è unLänder-tiposonda spaziale, sviluppato dallaagenzia spaziale statunitense,la NASA, che è atterrato sul pianetaMarte,su4 luglio 1997ad Ares Vallis , nella regione di Chryse Planitia . Il veicolo spaziale principale è soprattutto un dimostratore tecnologico a basso costo che convalida l'uso di una nuova tecnica di atterraggio morbido su Marte, utilizzando gli airbag , e utilizza per la prima volta su Marte un piccolo robot mobile ( astromobile ), Sojourner .
Mars Pathfinder è la prima missione della NASA sulla terra di Marte dal programma Viking , che ebbe luogo nel 1976, 20 anni prima. In origine, il progetto del centro di ricerca Ames , denominato MESUR , consisteva nella creazione di una rete di 16 stazioni dotate di sensori (sismometro, stazione meteorologica, ecc.) portate sul suolo di Marte da veicoli spaziali molto semplici. Il costo vertiginoso di questo progetto, le restrizioni di bilancio e il rifiuto da parte del nuovo amministratore della NASA di sviluppare missioni costose si traducono in un progetto quasi privo di contenuto scientifico che viene affidato al Jet Propulsion Laboratory . Mars Pathfinder è la seconda missione del programma Discovery della NASA che riunisce progetti di esplorazione del sistema solare a basso costo.
La missione Mars Pathfinder soddisfa completamente i limitati obiettivi prefissati e termina il27 settembre 1997. Il carico utile , ridotto a una stazione meteorologica , una telecamera e uno spettrometro a bordo del rover Sojourner , fornisce poche nuove informazioni scientifiche. D'altra parte, per la prima volta, i dettagli dell'andamento di una missione spaziale vengono comunicati in tempo reale al grande pubblico, con immagini di supporto, grazie alla generalizzazione di Internet, copertura mediatica che ha riscosso un enorme successo. Le innovazioni tecniche testate, il sistema di atterraggio con airbag e l'utilizzo di un rover saranno riutilizzati dalle missioni Mars Exploration Rover lanciate nel 2003.
contesto
All'inizio degli anni '90, l'unica esplorazione in situ approfondita della superficie di Marte è stata effettuata dalle sonde spaziali del programma Viking della NASA , che sono atterrate sulla superficie del pianeta nel 1976. Questi lander fissi non erano in grado di eseguire solo scansioni limitate a il sito di atterraggio. All'inizio degli anni '90, gli stabilimenti dell'agenzia spaziale americana stavano prendendo in considerazione nuovi metodi per esplorare la superficie di Marte. Nell'ambito del suo progetto MESUR ( Mars Environmental Survey ) , l' Ames Research Center propone di creare una rete di sensori in tutto il pianeta lanciando ogni volta che si apre la finestra di lancio su Marte (circa ogni due anni) quattro piccoli lander fissi lanciati da un singolo razzo e ciascuno incaricato di studiare una determinata regione. Per ridurre i costi, la tecnica utilizzata da queste sonde per scendere a terra è semplificata: niente radar, retrorazzi a spinta fissa e un sistema airbag per annullare la velocità di arrivo a terra. Ogni carrello di atterraggio è identico e ha una massa di 160 kg. È alimentato da un generatore termoelettrico a radioisotopi per scattare foto del sito e raccogliere dati con un sismometro e una stazione meteorologica. Dovevano essere lanciate sedici sonde, comprese le prime quattro nel 1996. La loro longevità doveva essere di almeno 8 anni in modo che l'intera rete di strumenti potesse operare almeno due anni contemporaneamente. Viene aggiunto un satellite per telecomunicazioni in orbita su Marte per consentire il trasferimento dei dati sulla Terra. Il costo totale in un decennio è di 1 miliardo di dollari. Da parte sua, il centro di ricerca di Langley propone di utilizzare penetratori che verrebbero rilasciati da un veicolo di discesa derivato dalle sonde spaziali Viking.
Il Jet Propulsion Laboratory (JPL) aveva precedentemente studiato una missione per restituire campioni di suolo sulla Terra da Marte che utilizzava un rover. I funzionari del JPL stanno avviando lo studio di una versione miniaturizzata di questo rover. L'ingegnere JPL Don Bickler offre un semplice sistema di sospensione articolato a 6 ruote che supera efficacemente gli ostacoli sul suolo di Marte. Un prototipo era stato costruito nel 1989.
Il budget del progetto MESUR aumenta man mano che gli studi avanzano, poiché la NASA deve affrontare restrizioni di budget. I funzionari della NASA decidono di assegnare la prima finestra di lancio del 1996 a un dimostratore tecnologico chiamato SLIM ( Surface Lander Investigation of Mars ). Questo è responsabile della convalida delle scelte tecniche di MESUR e quindi del convincere i funzionari della NASA a dispiegare la rete di sonde spaziali. Da parte sua, il Jet Propulsion Laboratory sta sviluppando un prototipo del suo rover con una massa di 7,1 kg e lo offre come carico utile per questa prima missione. Il rover deve consentire il dispiegamento del sismometro a terra. Questo deve essere a contatto con il suolo in modo che i segnali non vengano disturbati dalle vibrazioni comunicate alla sonda spaziale dal vento, variazioni di temperatura, ..... Al momento, l'uso di un braccio robotico per questo dispiegamento non è considerato una soluzione praticabile vista l'esperienza acquisita durante le missioni Viking (è comunque questa soluzione che verrà mantenuta per il dispiegamento del sismometro InSight lanciato nel 2018). La NASA dà la sua approvazione allo sviluppo del progetto e lo trasferisce al JPL. Il dimostratore SLIM viene rinominato MESUR Pathfinder. Per motivi di costo, il sismometro, la ragion d'essere delle stazioni MESUR, alla fine non è a bordo. È considerato una priorità inferiore rispetto al mini-rover. La durata del lander è limitata a 30 giorni (invece degli 8 anni delle stazioni MESUR) e i pannelli solari sostituiscono il generatore termoelettrico a radioisotopi . Infine, il sistema di atterraggio che utilizza gli airbag è l'unica caratteristica mantenuta dal progetto MESUR. Quest'ultimo è stato annullato poco dopo per motivi di budget e perché progetti di questa portata non rientrano più nella strategia di esplorazione del sistema solare sostenuta dal nuovo amministratore della NASA.
Obiettivi
La missione corrispondente al ritorno degli americani su Marte per vent'anni, i suoi obiettivi sono essenzialmente tecnici. Si tratta infatti di procedure di sperimentazione utilizzabili in seguito in missioni scientificamente ambiziose e quindi più costose.
- dimostrare che il motto " più veloce, migliore e più economico " (più veloce, migliore e più economico) può essere applicato alle missioni spaziali (la sonda è stata sviluppata in soli tre anni per un costo inferiore di 150 milioni di dollari , cinque volte inferiore al progetto Viking). In altre parole, per dimostrare che è possibile andare su un altro pianeta utilizzando una tecnologia sia più complessa che a un costo ragionevole. In questo caso il costo della missione Pathfinder ammonta a 280 milioni di dollari, inclusi i costi accessori (operazioni a terra durante la missione e lancio della sonda);
- testare un metodo di atterraggio totalmente innovativo: airbag giganti che ammortizzano l'impatto della sonda con il suolo.
Sito di atterraggio
Le missioni Viking, prima di atterrare su Marte, erano state poste in un'orbita che aveva permesso di studiare e selezionare sul posto il sito di atterraggio. Mars Pathfinder, dopo aver raggiunto Marte, entra direttamente nell'atmosfera marziana, il che significa che bisogna selezionare in anticipo il luogo di atterraggio per poter posizionare la sonda spaziale sulla giusta traiettoria. I vincoli sono però meno severi rispetto alle missioni Viking perché il sistema airbag permette di atterrare anche su terreni relativamente irregolari. L'utilizzo dei pannelli solari impone invece una latitudine alla quale il Sole è allo zenit alla data dello sbarco. Infine, l'altitudine del sito deve essere sufficientemente bassa da dare alla sonda spaziale il tempo di ridurre sufficientemente la sua velocità. In considerazione di questi vincoli tecnici, sono stati studiati dalla comunità scientifica una ventina di siti, riuniti nell'ambito di un workshop svoltosi nel 1994. Il sito di atterraggio prescelto, Ares Vallis , è un'ex pianura alluvionale, situata nell'emisfero settentrionale di Marte a 19,4 ° di latitudine nord e 33,1 ° di longitudine ovest. Si trova a circa 850 chilometri a sud-est del sito di atterraggio del Viking 1. Il sito è stato scelto perché c'è un'ampia varietà di rocce nel raggio d'azione del piccolo rover, alcune delle quali probabilmente provengono dalla regione degli altopiani che non è mai stata visitata prima .
Caratteristiche tecniche
La sonda spaziale Mars Pathfinder, che pesa 895 kg , è composta da quattro parti distinte:
- una fase di crociera che è attiva durante la fase di transito tra la Terra e Marte e che viene espulsa prima che la sonda spaziale entri nell'atmosfera di Marte,
- una fase di discesa che comprende principalmente uno scudo termico che protegge la sonda spaziale durante la traversata ad alta velocità e un paracadute il cui ruolo è quello di completare la riduzione della velocità
- lo scudo termico anteriore e il paracadute vengono rilasciati durante la fase finale della discesa. Il carrello atterra a terra, frenato da razzi retrò e poi airbag. Il lander è il cuore della sonda spaziale: comprende il computer di bordo, il sistema di comunicazione, due dei tre strumenti scientifici.
- il rover Sojourner è un'estensione mobile del lander e trasporta uno strumento scientifico.
L'insieme composto dal modulo di discesa e dal carrello di atterraggio (compreso il rover) pesa 570 kg.
Pavimento da crociera
La fase di crociera, che misura 2,65 metri di diametro e 1,5 metri di altezza, ha una massa di circa 300 kg di cui 94 kg di propellente ( idrazina ). Il suo ruolo è completare la separazione con il lanciatore, ruotare la sonda spaziale per stabilizzarla durante il transito tra la Terra e Marte e mantenere questa rotazione, apportare le necessarie correzioni di traiettoria durante questa fase, d' assicurare le comunicazioni con la Terra e posizionare infine il modulo di discesa in posizione per il rientro atmosferico. Una volta completato quest'ultimo compito, viene rilasciato dal modulo di discesa. È costituito da pannelli solari con una superficie di 4,4 m 2 che utilizzano celle fotovoltaiche di arseniuro di gallio e fornisce da 250 a 450 watt. L'energia necessaria per la fase di crociera è di 178 watt. Per correggere la sua traiettoria e controllarne l'orientamento, lo stadio di crociera utilizza 8 motori a razzo con una spinta di 4,4 newton che bruciano idrazina che consentono di modificare la velocità di 130 m / s durante l'intera missione. L'altra apparecchiatura è un'antenna a medio guadagno operante in banda X ed infine sensori solari e mirini stellari utilizzati per determinare l'orientamento (derivati da quelli della sonda spaziale Magellan .
-
I tre retrorazzi installati su un telaio che riproduce la forma dello scudo superiore.
-
Test di razzi retrò su un modello dello scudo superiore.
-
Airbag gonfiati e generatori di gas.
Modulo di discesa
Il modulo di discesa protegge la parte della sonda spaziale che deve atterrare al suolo dal calore che si sprigiona durante il rientro atmosferico, poi riduce la velocità in avvicinamento al suolo tramite paracadute e poi qualche secondo prima di toccare terra. razzi. Il modulo di servizio è costituito da uno scudo termico anteriore (il più esposto al calore) e uno scudo termico posteriore la cui forma e struttura sono direttamente derivate dal modulo di discesa delle sonde spaziali Viking. L'attrezzatura misura le prestazioni del modulo durante la discesa. Comprende anche un paracadute a fessura anch'esso derivato dalle sonde Viking e tre retrorazzi a propellente solido e un radar che permette i cui dati vengono utilizzati per innescare le operazioni finali durante la discesa. Il modulo di discesa ha una massa di circa 310 kg.
Lander
Il lander, prima del suo dispiegamento a terra, ha la forma di un tronco di piramide con tre lati. Ciascuno dei quattro pannelli che formano questa piramide è di forma triangolare e quadrato di 1 metro. Il pannello centrale funge da supporto per la scatola contenente l'elettronica e le antenne, gli altri tre sono collegati a questo pannello tramite giunti dotati di motori lenti ma potenti. Durante il dispiegamento, il lander si apre come un fiore, in modo che il rover (appoggiato su uno dei tre pannelli laterali) possa estrarsi. Il tutto quindi misura 2,75 metri di apertura alare per un'altezza di 1,5 metri. Nel caso in cui il carrello non atterri correttamente sulla sua base ma su uno dei suoi pannelli laterali, è previsto un dispositivo che gli consente di raddrizzarlo. Il lander ha tre pannelli solari triangolari con un'area di 2,8 m 2 che forniscono 1200 wattora al giorno quando l'aria è trasparente e la metà quando la polvere è sospesa nell'aria. L'energia è immagazzinata in batterie zinco-argento con una capacità di 40 ampere-ora. Tutti i componenti elettronici sono posti in una scatola centrale posta sul petalo centrale nella quale viene mantenuta una temperatura compresa tra 0 e 20 °C . Questa scatola ospita in particolare il computer di bordo che utilizza un microprocessore IBM RAD6000 , versione rinforzata via radio del PowerPC . Questo ha una memoria di massa di 128 megabyte per memorizzare i dati e le foto scattate. In questa scatola è memorizzato anche il sistema di comunicazione che assicura gli scambi con la Terra ma anche con il rover. Il lander ha una grande antenna a guadagno di 30 cm di diametro (velocità di 2250 bit al secondo), così come un'antenna a basso guadagno.
La principale innovazione apportata dal Jet Propulsion Laboratory è il sistema a palloncino che funge da ammortizzatore durante l'ultima parte della discesa. Gonfiati da generatori di gas otto secondi prima di atterrare a terra, circondano completamente il carrello. Una volta dispiegato, l'assemblaggio è largo 5,3 metri, alto 4,3 metri e profondo 4,8 metri. Questi airbag consentono di fare a meno di un sistema di propulsione a spinta variabile per raggiungere il suolo e di un sofisticato software di guida. Elimina anche il rischio associato a terreni irregolari. L'atterraggio può essere effettuato con una velocità verticale di 14 m/s , una velocità orizzontale di 20 m/s e in presenza di rocce alte 50 centimetri. Questo dispositivo non è davvero nuovo perché è stato utilizzato dai sovietici per posizionare alcune delle loro sonde sulla superficie della Luna. Il suo sviluppo ha portato a molte modifiche. Il sistema iniziale che consisteva in un solo strato di tessuto pesava solo 15 kg ma i test hanno dimostrato che erano necessari non meno di quattro strati portando il peso a 85 kg.
Il rover Sojourner
Il rover Sojourner (dal nome di Sojourner Truth ) pesa 10,6 kg ed è lungo 65 cm , largo 48 cm e alto 30 cm. Dotato di sei ruote, può teoricamente allontanarsi fino a 500 metri dalla zona di atterraggio. Il sistema di sospensione del tipo rocker-bogie è stato sviluppato da JPL e consente alle sue ruote da 13 centimetri di diametro di superare ostacoli di 20 centimetri e salire pendenze di 45 °. Ogni ruota ha un motore elettrico nel suo mozzo e può ruotare indipendentemente. La sua velocità di spostamento teorica è di 24 metri orari ma in pratica non supererà mai 1 cm/s durante le operazioni a terra su Marte. L'energia è fornita da un pannello solare con una superficie di 0,25 m 2 . Il consumo energetico delle sue apparecchiature e strumenti è di 16 watt. Durante la notte utilizza una batteria al litio non ricaricabile. Per mantenere le apparecchiature ad una temperatura accettabile, sono isolate termicamente da blocchi di aerogel, un materiale a densità molto bassa ma con un ottimo potere isolante. Questo dispositivo è completato da tre batterie contenenti ciascuna 2,6 grammi di plutonio 238, la cui disintegrazione fornisce calore. È collegato in banda UHF con il ricetrasmettitore radio del lander. Per i suoi movimenti Sojourner dispone di due modalità di funzionamento. Da un lato può ricevere istruzioni dalla Terra (tramite il lander). L'operatore analizza le immagini del terreno circostante per definire le istruzioni di movimento. Può anche navigare autonomamente analizzando la riflessione dei raggi luminosi emessi da cinque laser che ha nella parte anteriore. Questa analisi gli permette di distinguere gli ostacoli e di aggirarli. Se non riesce a trovare un passaggio, segnala via radio alla Terra che è bloccato.
Strumenti scientifici
Mars Pathfinder utilizza tre strumenti: la telecamera IMP e la stazione meteorologica ASI/MET installata sul lander e lo spettrometro a raggi X per protoni alfa APXS installato sul rover Sojourner .
Fotocamera IMP
IMP ( Imager for Mars Pathfinder ) è una telecamera stereo a colori che utilizza due ottiche per fornire immagini in rilievo. La telecamera è fissata 1 metro sopra il ponte superiore del carrello di atterraggio in cima a un albero telescopico costituito da una rete metallica che viene dispiegato dopo l'atterraggio. La telecamera può essere ruotata di 360° in orizzontale e da -73° a +83° in elevazione. Le due ottiche distanti 150 millimetri hanno una lunghezza focale di 23 millimetri e un campo visivo di 14,4°. Sono protetti dalla polvere esterna da lastre di silice fusa. Le due immagini raccolte vengono restituite a due rilevatori di tipo CCD affiancati, ciascuno comprendente 256 × 256 pixel . Sul percorso ottico è collocata una ruota portafiltri composta da quattro coppie di filtri atmosferici, due coppie di filtri per le immagini in rilievo e 11 filtri destinati a rivelare formazioni geologiche. Una lente diottrica consente di riprendere immagini ravvicinate di un piccolo magnete fissato a breve distanza dall'IMP per visualizzare la polvere che aderisce al magnete. La realizzazione della fotocamera è stata pilotata dall'Università dell'Arizona con il contributo della Lockheed Martin Company, del Max Planck Institute of Aeronomy di Lindau ( Germania ), della Technical University of Brunswick (Germania) e del Niels Bohr Institute di Copenhagen ( Danimarca ).
Stazione meteo ASI/MET
Lo strumento ASI/MET ( Atmospheric Structure Instrument/Meteorology Package ) deve raccogliere dati meteorologici come pressione, temperatura, velocità e direzione del vento una volta che il lander è a terra. Deve inoltre misurare le caratteristiche degli strati atmosferici attraversati durante la discesa. Lo strumento, che ha una massa di 2,41 kg, è sviluppato dal Jet Propulsion Laboratory . Include quattro termocoppie responsabili della misurazione della temperatura con una precisione di 0,1 ° C. Questi sono fissati su un albero alto 1 metro che viene posizionato verticalmente una volta che il lander è a terra. Le termocoppie sono equidistanti e posizionate a livello del suolo e alte 25 cm, 50 cm, 1 m. La pressione viene misurata da un sensore che deriva da quello utilizzato dalle missioni Viking . Tre maniche a vento fissate a diverse altezze sull'albero meteorologico consentono di misurare sia la direzione che la velocità del vento. La direzione è determinata fotografando regolarmente le maniche a vento con la fotocamera IMP.
Spettrometro a raggi X per protoni alfa APXS
APXS ( Alpha Proton X-Ray Spectrometer ) è uno spettrometro di particelle alfa e raggi X utilizzato per determinare gli elementi chimici presenti in un campione di roccia. Per ottenere ciò, lo strumento bombarda la roccia da analizzare con particelle alfa generate da una sorgente radioattiva ( curio 244 ). I rilevatori dello strumento analizzano quindi le particelle emesse in risposta al bombardamento. Un rilevatore di silicio analizza le particelle alfa restituite dai nuclei degli atomi nella roccia. Misurando la loro energia massima, può determinare con precisione la presenza di atomi leggeri come carbonio , ossigeno e azoto . È meno preciso per gli elementi più pesanti. Un secondo rivelatore al silicio misura anche i protoni espulsi dal bombardamento e permette di identificare atomi leggeri (massa atomica compresa tra 9 e 14) come sodio , alluminio , zolfo e magnesio . Il terzo rivelatore analizza i raggi X emessi dagli atomi più pesanti (dal sodio) e permette di determinare la proporzione degli elementi presenti con una precisione prossima al ppm. Tutti questi rilevatori possono funzionare solo se la loro temperatura è inferiore a -25 ° C o -35 ° C (a seconda del rilevatore). Un raffreddatore ad effetto Peltier permette di abbassare la temperatura dei rivelatori ma, per limitare i consumi energetici, i responsabili della missione hanno preferito non utilizzarlo e far funzionare lo strumento di notte, che su Marte è caratterizzato da temperature molto basse (-85 °C ). Lo strumento è installato su un braccio che viene dispiegato davanti al rover Sojourner per posizionare il rilevatore a contatto con la roccia. Per ottenere risultati, lo strumento deve rimanere premuto contro il campione per 10 ore. Lo strumento, che ha una massa di 0,56 kg, è una copia di quello a bordo della sonda russa Mars 96, a sua volta derivata dagli strumenti trasportati dalle sonde sovietiche Vega e Phobos. È fornito dal Max-Planck Institute for Chemistry di Mainz ( Germania ). Il rivelatore di raggi X è fornito dall'Università di Chicago .
Svolgimento della missione
Lancio e transito tra la Terra e Marte (4 dicembre 1996 - 4 luglio 1997)
Il lancio è stato rinviato due volte, la prima a causa del maltempo, la seconda a causa di un guasto al computer, che ha interrotto il conto alla rovescia, 4 minuti prima dell'accensione dei motori. Finalmente si svolge su4 dicembre 1996alle 06:58:07 ( UTC ), da ESMC / Launch complex 17B . Durante i sette mesi che dura il suo viaggio verso il Pianeta Rosso, lo stadio di crociera (un cilindro di 2,65 m di diametro e 1,5 m di altezza) fornisce energia a Pathfinder (grazie ai suoi 2,5 m 2 di pannelli solari) e assicura le trasmissioni con la Terra (grazie ad un'antenna a guadagno medio). Dotato di un sistema di propulsione (due serie di quattro ugelli e quattro serbatoi di idrazina) per le correzioni di rotta, gira due volte al minuto per stabilizzarsi. Grazie a lui, la sonda apporta quattro correzioni il 10 gennaio, il 3 febbraio, il 6 maggio e il 25 giugno.
| Rif. Piano |
Volta | Evento | Altitudine | Velocità | |
|---|---|---|---|---|---|
 |
1 | T - 34 minuti | Rilascio del piano di crociera | 8.500 km | 7,26 km/sec |
| 2 | T - 4 minuti | Inizio del rientro atmosferico | 125 km | 7,26 km/sec | |
| 3 | T - 2 minuti | Dispiegamento del paracadute | 6-11 km | 350-450 m/s | |
| 4 | T - 100 s | Rilascio scudo termico anteriore | 5-9 km | 95-130 m/s | |
| 5 | T - 80 s | Dispositivo di atterraggio sospeso con fune | 3-7 km | 65-95 m/sec | |
| 6 | T - 32 sec | Il radar misura la distanza al suolo | 1,5 km | 60-75 m/sec | |
| 7 | T - 8 secondi | Gli airbag sono gonfiati | 300 m | 52-64 m/sec | |
| 8 | T - 4 secondi | Lanciare razzi retrò | 50-70 m | 52-64 m/sec | |
| 9 | T - 2 secondi | Carrello di atterraggio | 0-30 m | 0-25 m/sec | |
| 10 | T + 15 min | Gli airbag si sgonfiano | per terra | ||
| 11 | T + 75 min | Retrazione degli airbag atmosferici | |||
| 12 | T + 120 min | Trasmissione dei primi dati | |||
| T = tempo di atterraggio. | |||||
Arrivo su Marte (4 luglio 1997)
Discesa al suolo marzianoLa sequenza di atterraggio inizia a quota 8.500 km , cioè 35 minuti prima del contatto con il suolo, espellendo la fase di crociera, ormai inutile. A differenza delle sonde Viking, Pathfinder non orbita attorno al pianeta, rientra direttamente, a quota 130 km , con un angolo di 14,2°. La sonda è protetta dal riscaldamento eccessivo da uno scudo termico di 2,65 metri di diametro. Grazie a questa frenata “naturale”, la velocità di Pathfinder si riduce a 1.440 km/h . Mentre il terreno distava solo 9,4 km , è stato lanciato un paracadute di 11,5 m di diametro. La velocità di Pathfinder scende a 234 km/h . Venti secondi dopo, lo scudo termico viene espulso. Trascorrono altri venti secondi prima che la sonda venga calata all'estremità di una linea di kevlar lunga 30 metri, la cui estremità è fissata allo scudo superiore (fissato al paracadute). La distanza dal suolo è di soli 6,6 km . Quando mancano solo 300 m , otto secondi prima del contatto con il suolo, il grappolo di 24 palloni protettivi si gonfia tutto intorno in meno di un secondo. Due secondi dopo, quando la sonda si trova a soli 50 m da terra, i tre retrorazzi inchiodati allo scudo superiore si accendono, fermando istantaneamente il tutto in aria. Quasi contemporaneamente viene recisa la flangia in kevlar che collegava la sonda allo scudo superiore: Pathfinder percorre gli ultimi venti metri che lo separano dal suolo in caduta libera e tocca il suolo con una velocità di 19 m/s , cioè 68 km/h . Erano quindi passati quattro minuti e mezzo dall'inizio del suo rientro nell'atmosfera, toccava il suolo di Ares Vallis . Erano le 2 h 56 min 55 s del mattino, ora di Marte (cioè 16 h 56 min 55 s UTC . Il sito di atterraggio era localizzato come previsto ad Ares Vallis, 19 chilometri a sud - ovest del centro dell'ellisse. Le coordinate sono 19,33 ° di latitudine nord e 33,52 gradi di longitudine ovest Mars Pathfinder ha fatto rimbalzare da quindici a venti volte i suoi airbag (inizialmente fino a 15 m di altezza), a volte sulle rocce prima di stabilizzarsi.
Lo scudo superiore, dal canto suo, dopo lo sgancio del carrello, riprende un po' di quota sotto la spinta dei retrorazzi, che continuano a funzionare per due secondi per trascinarlo il più lontano possibile dal luogo di atterraggio e per' evitare che ricada sulla sonda. Il sito di atterraggio è chiamato Carl Sagan Memorial in onore dell'astronomo e planetologo americano Carl Sagan , che era stato un grande sostenitore dell'esplorazione spaziale e che era morto appena due settimane dopo il lancio della sonda spaziale.
Attivazione carrello di atterraggioUn'antenna a basso guadagno è fissata alla sommità della sonda spaziale e mentre c'era una possibilità su quattro che la sonda spaziale si fermasse con la sua base appoggiata a terra (se non fosse stato il caso l'apertura dei petali avrebbe messo il lander in alto) questo è quello che è successo a Mars Pathfinder. L'antenna permette alla sonda spaziale di informare immediatamente la sala controllo che l'atterraggio è andato a buon fine. Una volta che la polvere sollevata dal pianerottolo si è depositata, i cuscini si sgonfiano grazie all'apertura di valvole poi vengono retratti da cavi in kevlar per consentire l'apertura dei petali che delimitano il cuore della sonda spaziale. I petali del lander si aprono, esponendo i suoi pannelli solari. Essendo l'atterraggio avvenuto di notte, è necessario attendere l'alba per consentire ai pannelli solari di fornire energia e di prendere in consegna le batterie. La telecamera viene utilizzata per determinare la posizione del Sole, che a sua volta permette di orientare l'antenna ad alto guadagno verso la Terra e inviare le prime informazioni dettagliate alla Terra.
Durante il primo giorno sulla superficie di Marte , la fotocamera scatta le prime immagini e vengono effettuate alcune letture meteorologiche. Gli ingegneri si rendono quindi conto che uno dei cuscini non si è completamente sgonfiato e che potrebbe quindi interferire con lo sbarco del rover. Per risolvere questo problema, alzano e poi abbassano più volte un petalo del lander per appiattire il cuscino. I dati trasmessi quel giorno contengono quelli raccolti durante la discesa per la prima volta per avere un profilo di temperatura verticale dell'atmosfera marziana durante la notte. I dati dei sensori sepolti nello scudo termico consentono inoltre di convalidare il design di questa apparecchiatura che verrà ripresa dalle successive sonde spaziali marziane. La telemetria indica che il lander ha un'inclinazione ridotta di 2°.
Operazioni a terra (4 luglio - 27 settembre 1997)
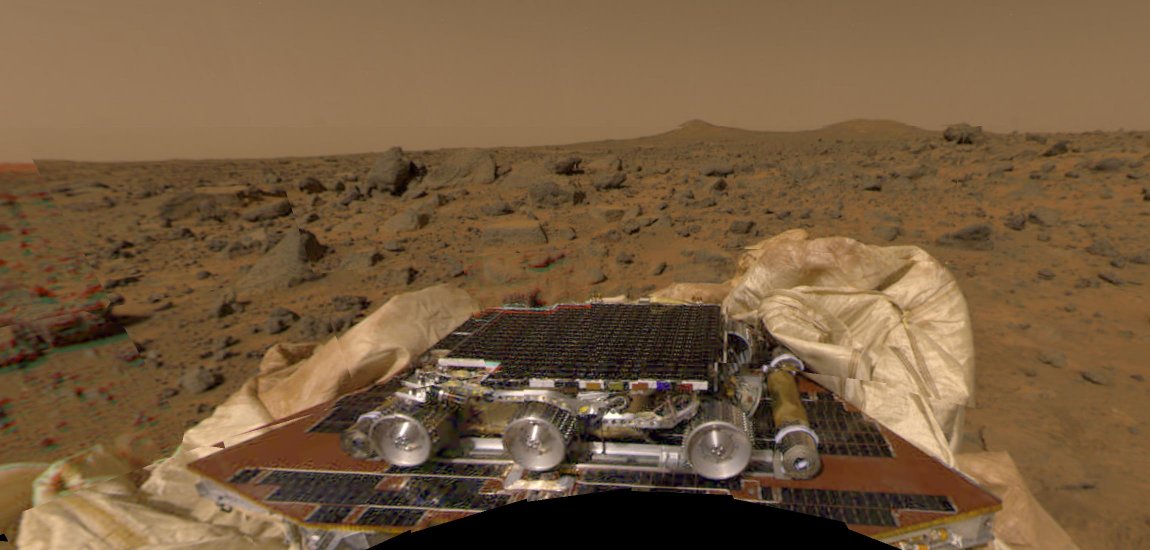
Scoperta del sito di atterraggioLe foto circostanti mostrano una moltitudine di piccole rocce con varie forme, trame e colori che deliziano i geologi. Inoltre, mentre il terreno circostante è abbastanza pianeggiante, a pochi metri di distanza compaiono piccole increspature e all'orizzonte sono visibili due colline alte oltre 50 metri, una con sommità conica e l'altra con sommità appiattita. Distanti 860 metri, vengono rapidamente battezzati Twin Peaks . Ai lati di queste colline si trovano tracce di depositi, colate e terrazzi formati da colate. A sud del sito, un'ondulazione è infatti il labbro di un cratere di 1,5 km di diametro che, al momento della sua formazione, ha espulso rocce che si sono mescolate con quelle probabilmente trasportate dalle alluvioni. Piccole proiezioni visibili all'orizzonte corrispondono a rilievi, il più distante dei quali sembra distare una quarantina di chilometri. Alcune rocce sono molto taglienti, altre sono arrotondate o mostrano segni di erosione da parte del vento che non erano mai stati osservati prima sul pianeta. I ciottoli tondeggianti , le rocce spesso inclinate o allineate su un asse nord-est sembrano confermare la tesi dei detriti ivi trasportati dalle piene.
Il colore del cielo è una sorpresa per gli scienziati. Sebbene da anni non si verifichino grandi tempeste di polvere, questa è di colore rosa, il che suggerisce che la polvere, che causa questa colorazione, è permanentemente presente nell'atmosfera. L'operazione di ritrazione dell'airbag ha rivelato il terreno immediatamente sotto la superficie, che è più scura. Altre macchie scure sono visibili più avanti nelle immagini riprese dalla fotocamera. Sembrano indicare dove gli airbag hanno toccato il suolo prima di rimbalzare. Ingegneri e scienziati hanno rapidamente chiamato le rocce circostanti dando loro i nomi di personaggi immaginari, in particolare dei cartoni animati : Barnacle Bill , Yogi , Scooby Doo , Casper , Boe , Stimpy , Bullwinkle , Wedge ...).
Atterraggio del roverL'atterraggio del rover Sojourner sul suolo marziano non è andato senza intoppi. Due rampe di atterraggio sono srotolate una davanti, l'altra dietro al rover. Ma la rampa anteriore non tocca terra. Quello posteriore, invece, è a contatto con il suolo ma richiede di pilotare il rover in retromarcia senza beneficiare delle telecamere tutte poste sulla parte anteriore del veicolo. Inoltre, un airbag trabocca leggermente sulla rampa e i collegamenti radio tra Sojourner e Mars Pathfinder vengono interrotti. Gli ingegneri decidono di rimandare l'atterraggio del rover al giorno successivo. Quando le comunicazioni sono state ristabilite il giorno successivo, il computer di Sojourner si è riavviato per qualche motivo poco chiaro, ma questo evento ha risolto i problemi di comunicazione tra il rover e il lander. Gli ingegneri innescano le cariche pirotecniche che liberano il rover dai suoi ceppi e inviano l'istruzione di avvio. Il rover scende all'indietro sulla rampa posteriore e tocca il suolo marziano una decina di minuti dopo.
Esplorazione del sito di atterraggioImmediatamente dopo essere atterrato, il rover utilizza il suo spettrometro per determinare la composizione del suolo marziano nella notte successiva. Il supporto telescopico della telecamera IMP è dispiegato che ne consente il posizionamento ad un'altezza di 1,4 metri. Il giorno successivo, Sojourner posiziona il suo spettrometro APXS al contrario a contatto con la roccia chiamata Barnacle Bill e da questa posizione scatta una foto della sonda spaziale, ma i cuscini sgonfiati ostruiscono parzialmente il suo campo visivo. L'analisi della roccia, la prima su Marte, rivela una sorprendente proporzione di silicio che implica la presenza di quarzo come l'andesite sulla Terra. Ma questo risultato è controverso perché potrebbe provenire da uno strato superficiale, estraneo alla roccia, e creato dall'esposizione di questa agli elementi e ai bombardamenti di particelle (vento solare, raggi cosmici). Una seconda roccia chiamata Yogi , di grandi dimensioni, di forma tondeggiante e curiosamente composta da due colori, costituisce il secondo bersaglio studiato. Ma a seguito di un'errata manovra di avvicinamento, quindi di diverse anomalie successive, occorrono quattro giorni perché lo spettrometro venga posizionato contro la roccia. Successivamente, Sojourner analizza una roccia bianca chiamata Scooby Doo e poi una porzione di terreno sabbioso. Per la prima volta usa il suo sistema di navigazione autonomo per spostarsi.
Durante questo periodo, la fotocamera Mars Pathfinder viene utilizzata per scattare panorami, assistere il rover nella sua navigazione riprendendo immagini della sua posizione alla fine di ogni giornata e fotografando le maniche a vento e i magneti utilizzati per raccogliere la polvere magnetizzata. . Le immagini scattate mostrano che le ruote del rover rivelano porzioni di terreno di colore rosato. Dopo aver esaminato una roccia chiamata Souffle, i controllori di terra hanno deciso di aggirare il lander con il rover per spostarsi verso un gruppo di rocce chiamato Rock Garden (il "giardino roccioso"). Sono passati 38 giorni dall'atterraggio, quando Sojourner ha raggiunto il suo obiettivo. Il rover, a seguito di un errore di un sensore, si impegna ad issarsi su una roccia che porta la sua inclinazione a 20°. I meccanismi di protezione vengono attivati e l'avanzamento del rover viene interrotto. Nei successivi 20 giorni, il rover scansiona le rocce Sharp, Moe e Half Dome. Il 58 ° giorno, le batterie Sojourner smettono di funzionare: lo spettrometro non può più essere utilizzato di giorno in cui le celle solari sulla sommità del rover forniscono energia. Il 76 ° giorno Sojourner riesce a fotografare un campo di piccole dune non visto dalla macchina fotografica di Mars Pathfinder.
Allo stesso tempo, gli strumenti accumulano osservazioni dell'atmosfera di Marte. Le foto del crepuscolo marziano e la misurazione del calo della produzione di elettricità da parte dei pannelli solari vengono utilizzate per misurare la percentuale di polvere nell'atmosfera. La quantità di acqua in sospensione riprendendo immagini del Sole con filtri corrispondenti alle linee di assorbimento del vapore acqueo. A volte si vedono nuvole di ghiaccio d'acqua blu nel cielo. La temperatura a diverse altitudini dal suolo viene misurata continuamente.
Fine della missione (27 settembre)
Dopo aver studiato il sito di Rock Garden, il team del progetto prevede di inviare Sojourner molto più lontano per valutare le sue capacità e aiutare a sviluppare la prossima generazione di rover. Ma caricare la batteria di Mars Pathfinder si deteriora gradualmente. Un ultimo contatto con la sonda spaziale avviene su27 settembre 1997alle 10:23 ora universale . il28 settembre, la sonda spaziale non risponde più. Il motivo esatto dell'interruzione delle trasmissioni non è certo, ma l'interruzione è probabilmente dovuta all'esaurimento della batteria durante la notte che avrebbe azzerato l'orologio interno. Quando torna la luce del giorno e l'energia torna a fluire, il sistema di bordo computer non avrebbe potuto localizzare la Terra e quindi puntare l' antenna parabolica verso di essa. Una connessione breve viene ripristinata la 1 ° e la7 ottobrema senza che venga trasmesso alcun dato. Poiché l'elettronica è esposta a una temperatura sempre più bassa ogni notte, è probabile che dopo un po' di tempo abbia smesso di funzionare durante il giorno. Gli ingegneri abbandonano il10 marzo 1998 tenta di stabilire un contatto.
Risultati della missione
Durante la sua permanenza sulla superficie di Marte, sono state scattate e trasmesse 17.050 immagini (di cui 550 dal rover) e sono state effettuate 8,5 milioni di misurazioni della pressione atmosferica , della temperatura e della velocità del vento marziano. Il rover ha percorso un centinaio di metri ed ha effettuato 230 manovre, effettuando l'analisi chimica di sedici diverse rocce e chiazze di terreno, dislocate su un'area di circa 250 m 2 . La missione, che doveva durare sette giorni, è durata 12 volte di più.
A livello puramente scientifico, i risultati della missione, che era principalmente tecnologica, sono relativamente scarsi:
- l'analisi chimica delle rocce e del suolo indica una significativa concentrazione di silicio suggerendo che i materiali originali sono differenziati. Le rocce analizzate hanno caratteristiche diverse da quelle dei meteoriti raccolti sulla Terra e che si presume siano di origine marziana.
- i sassi e le rocce rinvenuti sul terreno così come le inclusioni in alcune rocce tutte caratterizzate da forme arrotondate suggeriscono che Marte un tempo conobbe un clima caldo che permetteva all'acqua liquida di scorrere sulla sua superficie.
- scanalature e solchi visibili su alcune rocce suggeriscono che siano state erose da particelle delle dimensioni di un granello di sabbia. Depositi dunali presenti in prossimità della zona di atterraggio indicano anche la presenza di sabbia.
- la chimica del suolo nel sito di atterraggio è simile a quella incontrata dai lander Viking 1 e Viking 2.
- Il monitoraggio delle trasmissioni radio da Mars Pathfinder indica che il nucleo metallico di Marte ha un diametro compreso tra 1.300 e 2.000 chilometri.
- la polvere nell'atmosfera è costituita da particelle magnetizzate di 1 micron di diametro. È probabile che il minerale magnetico sia la maghemite, una delle varianti dell'ossido di ferro che si depositava e cementava le particelle di polvere sotto l'effetto del freddo e della siccità. Il ferro proverrebbe dalla lisciviazione delle rocce durante la fase calda che Marte avrebbe conosciuto.
- vortici di polvere sono stati osservati frequentemente e suggeriscono che formano il meccanismo che inietta la polvere nell'atmosfera di Marte.
- le foto scattate mostrano la presenza di nubi di ghiaccio d'acqua nella bassa atmosfera all'inizio della giornata. Questi si dissipano quando l'atmosfera si riscalda.
- Al mattino sono stati misurati sbalzi di temperatura che suggeriscono che l'atmosfera è riscaldata dalla superficie del pianeta e che questo calore è diffuso dalle correnti ascensionali.
- il clima è simile a quello del sito di atterraggio del Viking 1 con rapidi cambiamenti di pressione e temperatura, venti indeboliti durante la notte e venti generalmente deboli. Le temperature di superficie sono generalmente più calde di 10 °C rispetto al sito Viking 1.
- l'atmosfera ha una tinta rosa tenue dovuta alla presenza di particelle di polvere fine nella bassa atmosfera, fenomeno già osservato nei siti di atterraggio delle sonde spaziali Viking. La dimensione e la forma delle particelle di polvere e la quantità di vapore acqueo presente nell'atmosfera sono simili a quelle trovate dai lander vichinghi.
I seguenti rover
Sebbene la sua autonomia fosse molto limitata, Sojourner è stata la prima macchina a muoversi sul suolo marziano. Da allora, altri cinque rover, i primi quattro sviluppati dall'agenzia spaziale statunitense, e il rover cinese Zhurong , sono atterrati su Marte:
- Spirito : è uno dei due rover del progetto Mars Exploration Rover (MER). Avendo lasciato la Terra accesa10 giugno 2003, è atterrato su Marte il 4 gennaio 2004. Attivo fino al 2009, ha percorso 7,7 km prima di rimanere bloccato in una duna.
- Opportunità : il gemello di Spirit, come lui, ha lasciato la Terra nell'estate del 2003 ed è atterrato su Marte nelgennaio 2004. Ma è stato molto più resistente di lui visto che è rimasto attivo per più di quattordici anni, coprendo così più di 45 km . È stato messo a dormire dalla NASA su10 giugno 2018in seguito a violenti temporali, che hanno inquinato i suoi pannelli solari. Nelfebbraio 2019, la NASA ne annuncia ufficialmente la disattivazione.
- Curiosità : lanciato il26 novembre 2011, più pesante e potente dei due "MER", questo rover non è, come loro, alimentato da pannelli solari ma da un generatore nucleare, che gli permette di funzionare in tutte le stagioni e giorno e notte. Avendo raggiunto la superficie di Marte il6 agosto 2012, Ha viaggiato 23.33 km a su12 novembre 2020.
- Perseveranza : dopo il lancio il 30 luglio 2020, questo nuovo rover è atterrato il 18 febbraio 2021 all'interno del cratere Jezero di 49 chilometri di diametro vicino al bordo nord-occidentale di esso. Con un'architettura simile a quella del suo predecessore, Perseverance dispone di strumenti più scientifici che gli consentono di scoprire tracce di vita.
- Zhurong : (in cinese祝融, Zhùróng ) è il primo rover marziano cinese appartenente alla missione Tianwen-1 lanciato su Marte il23 luglio 2020alle 12 h 41 (UTC + 8) dalla base di lancio Wenchang . È atterrato su14 maggio 2021, rendendo la Cina il secondo paese ad atterrare con successo su Marte e stabilire comunicazioni dalla superficie marziana, dopo gli Stati Uniti . Zhurong è stato distribuito con successo il 22 maggio 2021, alle 02:40 UTC.
Nella cultura popolare
- nel film Red Planet , gli astronauti in via di estinzione su Marte usano parti di Sojourner per creare una radio improvvisata e comunicare con la loro astronave.
- nella serie Star Trek: Enterprise , Sojourner appare brevemente come monumento storico.
- nel romanzo Alone on Mars e nel suo adattamento cinematografico , un astronauta abbandonato su Marte si reca su Pathfinder per recuperare e riparare la sonda per comunicare con la Terra.
Note e riferimenti
Appunti
- questo metodo può essere applicato solo con macchine di piccole dimensioni, quindi non può essere generalizzato.
- Questo metodo sarà utilizzato per lo sbarco di Curiosity nel 2012.
Riferimenti
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 442-443
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 443
- (in) Philippe Labro, " Un'occasione ogni 20 anni: MEAS " sul sito ufficiale SEIS-INSIGHT , Institut de Physique du Globe de Paris (consultato il 24 novembre 2018 )
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 451-452
- Mars Pathfinder Mission (Golombek) , p. 3954
- (in) " Mars Pathfinder Fact Sheet " , NASA (consultato il 23 novembre 2018 )
- Cartella stampa Mars PathfinderLanding , p. 28
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 445
- Philippe Labrot, “ Mars Pathfinder ” , sul sito web di P. Labrot (consultato il 23 novembre 2018 )
- (en) " Mars Pathfinder Instrument Descriptions " , sul sito ufficiale di Mars Pathfinder , NASA ,23 novembre 2018
- Philippe Labrot, “ Mars Pathfinder - Les instruments scientifique ” , sul sito web di P. Labrot (consultato il 23 novembre 2018 )
- (in) " Mars Pathfinder: Entry Descent and Landing " sul sito ufficiale Mars Pathfinder , NASA (consultato il 23 novembre 2018 )
- Foto: http://www.astrocosmos.net/articles/mission/pathfinder-sojourner.jpg
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 454
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 454-455
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 455-456
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 456-457
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 457-458
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 458
- Esplorazione robotica del sistema solare Parte 2 Interruzione e rinnovamento 1983-1996 , p. 460
- Golombek 1997 , p. 1
- (in) Cartella stampa NASA : Mars Polar Lander / Deep Space 2 , NASAdicembre 1999( leggi in linea ) , p. 14
- Aggiornamenti sulle opportunità
- NASA conferma la morte del robot marziano Opportunity , Le Monde , 13 febbraio 2019.
- (in) "La missione da record della NASA su Marte sta per concludersi " su nasa.gov ,13 febbraio 2019(consultato il 14 febbraio 2019 ) .
- Puoi seguire regolarmente il suo chilometraggio su un sito JPL: http://mars.nasa.gov/msl/mission/whereistherovernow/
- Andrew Jones , " Lancio di Tianwen-1 per Marte, che segna l'alba dell'esplorazione interplanetaria cinese ", SpaceNews ,23 luglio 2020( letto online , consultato il 23 luglio 2020 )
- Steven Lee Myers e Kenneth Chang , " La missione cinese Mars Rover atterra sul pianeta rosso ", The New York Times ,14 maggio 2021( letto online , accesso 16 maggio 2021 )
- Rémy Decourt, " Marte: primi giri delle ruote per il rover Zhurong " , su Futura Sciences ,24 maggio 2021
- Lei Zhao , " Il rover cinese Zhurong si sposta sulla superficie marziana per iniziare le operazioni scientifiche ", China Daily ,22 maggio 2020( letto online , consultato il 22 maggio 2021 )
{kind=link}
Bibliografia
NASA
- (it) NASA, Mars Pathfinder Landing ,luglio 1997( leggi in linea )Cartella stampa fornita dalla NASA per l'atterraggio di Mars Pathfinder
- (it) Mathew P. Golombek , T. Economou , WM Folkner et al. , " La missione Mars Pathfinder " , Journal of Geophysical Research , vol. 102, n o E2,25 febbraio 1997, pag. 3953-3965 ( DOI 10.1029/96JE02805 , leggi in linea ) - Presentazione della missione
- (it) MP Golombek , T. Economou , WM Folkner et al. , " Panoramica della missione Mars Pathfinder e valutazione delle previsioni sui siti di atterraggio " , Science , vol. 278, n . 5344,5 dicembre 1997, pag. 1743-1748 ( DOI 10.1126 / science.278.5344.1743 , leggi online ) - Riepilogo dei risultati della missione Mars Pathfinder
- (it) PH Smith , JF Bell III , NT Bridges et al. , " Risultati della fotocamera Mars Pathfinder " , Science , vol. 278, n . 5344,5 dicembre 1997, pag. 1758-1765 ( DOI 10.1126 / science.278.5344.1758 , leggi online ) - Riepilogo dei risultati della missione Mars Pathfinder
Altri lavori
- (it) Paolo Ulivi e David M Harland, Esplorazione robotica del sistema solare Parte 2 Iatus and Renewal 1983-1996 , Chichester, Springer Praxis,2009, 535 pag. ( ISBN 978-0-387-78904-0 )Storia e percorso dettagliato delle missioni interplanetarie tra il 1982 e il 1996
- (it) Peter J. Westwick, Into the black: JPL e il programma spaziale americano, 1976-2004 , New Haven, Yale University Press ,2006, 413 pag. ( ISBN 978-0-300-11075-3 ) - Storia del Jet Propulsion Laboratory tra il 1976 e il 2004
- (it) Erik M. Conway, Esplorazione e ingegneria: il laboratorio di propulsione a getto e la ricerca di Marte , Baltimora, Johns Hopkins University Press ,2015, 418 pag. ( ISBN 978-1-4214-1605-2 , leggi online ) - Storia del programma di esplorazione marziana del Jet Propulsion Laboratory
Vedi anche
Articoli Correlati
- Esplorazione del sistema marziano
- Esplorazione di Marte Rover
- Spettrometro per particelle alfa e raggi X
- Astromobile
- Programma Discovery e Programma Mars Surveyor
- Progetto abbandonato MESUR all'origine della missione Mars Pathfinder
- Mutex (questo articolo descrive in dettaglio il bug informatico di cui è stata vittima la missione).